IEC60335 گھریلو ایپلائینسز کیبل فلیکسنگ اور کنڈا کنکشن گردش ٹیسٹ کا سامان
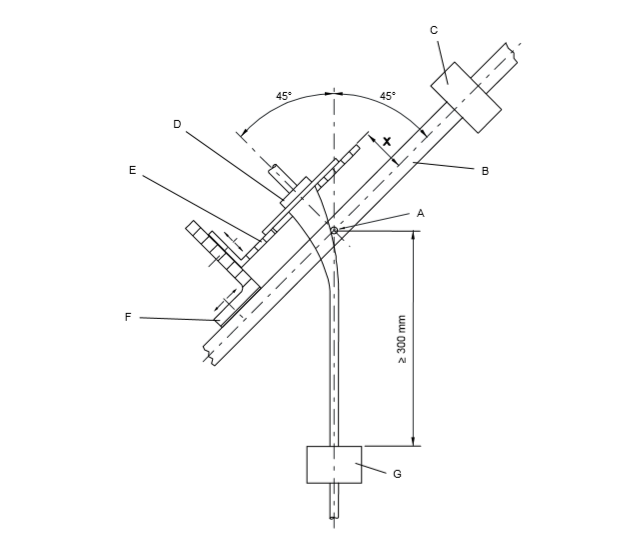
آلے کا وہ حصہ جس میں انلیٹ اوپننگ شامل ہے دوغلی رکن کے ساتھ طے کیا جاتا ہے تاکہ جب سپلائی کی ہڈی اپنے سفر کے وسط میں ہو، تو اس ڈوری کا محور جہاں سے یہ کورڈ گارڈ یا انلیٹ میں داخل ہوتا ہے عمودی ہو اور دولن کے محور سے گزرے۔ فلیٹ ڈوریوں کے حصے کا بڑا محور دولن کے محور کے متوازی ہوگا۔
ہڈی کو لوڈ کیا جاتا ہے تاکہ لاگو قوت ہے
- 10 N، ان ڈوریوں کے لیے جن کا برائے نام کراس سیکشنل رقبہ 0,75 mm2 سے زیادہ ہو۔
- 5 N، دوسری ڈوریوں کے لیے۔
فاصلہ X، جیسا کہ IEC60335 شکل 8 میں دکھایا گیا ہے، دولن کے محور اور اس نقطہ کے درمیان جہاں سے کورڈ یا کورڈ گارڈ آلات میں داخل ہوتا ہے، کو ایڈجسٹ کیا جاتا ہے تاکہ جب دوغلی رکن اپنی پوری رینج سے آگے بڑھے، تو ہڈی اور بوجھ کم از کم پس منظر کی حرکت کریں۔
دوہری رکن کو 90° (عمودی کے دونوں طرف 45°) کے زاویے سے منتقل کیا جاتا ہے، قسم Z اٹیچمنٹ کے لیے لچک کی تعداد 20 000 اور دیگر منسلکات کے لیے 10 000 ہے۔ موڑنے کی شرح 60 فی منٹ ہے۔
معیاری لباس:
کمی اور گھومنے والے گیئر کے ساتھ 1 الیکٹرک ڈرائیو موٹر،
1 آؤٹ پٹ شافٹ، عمودی کے دونوں طرف گھومنے والا زاویہ 45°,60° یا 90°،
وزن کا 1 سیٹ، 5N-10N،
1 رفتار ایڈجسٹمنٹ، گھومنے والی فریکوئنسی 10~60 rpm کے لیے،
1 کنٹرول یونٹ جس میں ڈرائیو کو بند کرنے کے لیے 6 ہندسوں کا پہلے سے تعین کرنے والا کاؤنٹر ہے، اور جب نمونہ کھلا ہوا سرکٹ ہوتا ہے تو گھومنے کی تعداد کو ریکارڈ کرتا ہے،
3 KVA پاور آؤٹ پٹ کا 1 کنٹرول سرکٹ، نمونے کو بجلی کی فراہمی،
بجلی کی فراہمی: AC220V 50Hz، درخواست پر دیگر وولٹیجز اور فریکوئنسی۔